

 联系我们
联系我们

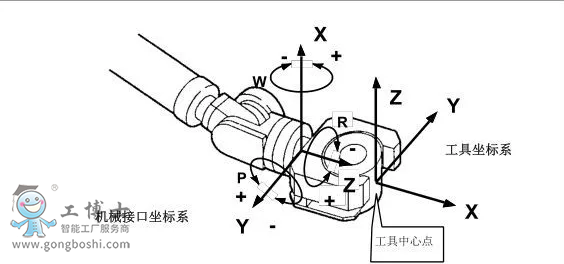
工具坐标系,由工具中心点(TCP)的位置(x,y,z)和工具的姿势(w,p,r)构成。
工具中心点(TCP)的位置,通过相对机械接口坐标系的工具中心点的坐标值x、y、z来定义。
工具的姿势,通过机械接口坐标系的X轴、Y轴、Z轴周围的回转角w、p、r来定义。
工具中心点用来对位置数据的位置进行示教。在进行工具的姿势控制时,需要用上工具姿势。
图 3.9.1(a) 工具坐标系
工具坐标系,在坐标系设定画面上进行定义,或者通过改写如下系统变量来定义。可定义 10 个工具坐标系,并可根据情况进行切换
• 在$MNUTOOL[group, i](坐标系号码 i = 1~10)中设定值。
• 在$MNUTOOLNUM[group]中,设定将要使用的工具坐标系号码。
可通过以下方法将工具坐标系编号*多增加到 29 个。
1 进行控制启动。
2 按下 MENU(菜单)键。
3 选择“4 系统变量”。
4 将系统变量$SCR.$MAXNUMUTOOL 的值改写为希望增大的值(*多 29 个)。
5 执行冷启动。
可用以下 4 种方法来设定工具坐标系。
六点示教法包括六点(XY)示教法、和六点(XZ)示教法。
直接输入法是用户知道要设定的工具坐标和出厂的坐标在空间中相差的数据直接输入即 可使用。(注:三点法和六点法的区别在于三点法只是改变出厂工具坐标的数值。而六点法可以改变出厂工具坐标的数值和 方向。我们在进行设定工具坐标时经常使用三点法完成以后再对w、p、r的数值进行输入
六点(XZ)示教法中,取一个方向原点、一个与所需工具坐标系平行的X轴方向点、一个XZ平面上的点。此时,通过笛卡尔点动或工具点动进行示教,以使工具的倾斜保持不变。
了解更多:发那科机器人
