

 联系我们
联系我们

外围设备和机器人之间,通过向一个干涉区域分配的一个互锁信号(输入/输出各1个)进行通信。干涉区域*多可以定义3个。(7DC1/07、7DD0/01、7DC2/01 或更新版,能够定义的干扰区域的*大数已从 3 变更为 10。)
输出信号
工具中心点存在于干涉区域内时,该输出信号断开,存在于区域外时,该输出信号接通。
安全状态(干涉区域外)输出信号接通
危险状态(干涉区域内) 输出信号断开
输入信号
在输入信号断开的状态下,机器人试图进入干涉区域内时,机器人进入保持状态。输入信号接通时,保持状态就被解除,系统自动地重新开始操作。
注意:
机器人从工具中心点进入干涉区域内的时刻起减速停止,所以机器人实际停止的位置,是进入干涉区域内的位置。此外,机器人的动作速度越快,停止位置就越进入区域内。应考虑到此要素和工具的大小等因素,设定较大的干涉区域。
通过[6 设定. 防止干涉功能]来进行防干涉区域功能的设定。

在“Space Check:防止干涉功能/详细”画面中进行以下项目的设定。

在“Space Check:防止干涉功能/空间设定”画面中进行以下条目的设定。
机器人系统的设定
具体操作步骤
1 按下[MENU](菜单)键,显示出画面菜单。
2 选择“6 设置”。
3 按下 F1“类型”,显示出画面切换菜单。
4 选择“防止干涉区域”。出现区域一览画面。
区域一览画面
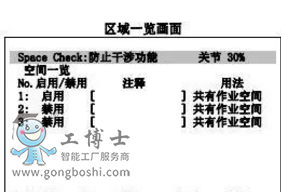
5 可以在区域一览画面上通过功能键进行各干涉区域的有效/无效切换。此外,要输入注释,执行如下操作。
a 将光标移动到注释行,按下 ENTER(输入)键。
b 选择使用单词、英文字母中的哪一个来输入注释。
c 按下适当的功能键,输入注释。
d 注释输入完后,按下 ENTER 键。
6 要设定有效/无效、注释以外的条目,按下 F3“详细”。出现详细画面。
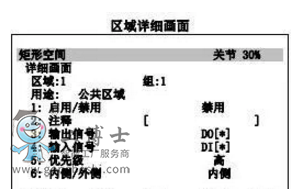
7 将光标移动到希望变更的条目位置,通过功能键或数字键进行变更。
8 要进行空间的设定,按下 F2“区域”。出现空间设定画面。
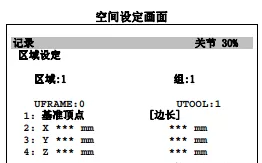
9 可通过下面两种方法来设定基准顶点、坐标系边长或对角端点。
a 将光标移动到X、Y、Z的位置,通过数字键直接输入坐标值。
b 将机器人移动到直方体顶点后通过 SHIFT 键+F5“记录”来读出机器人的当前位置
注释:
1 在试图变更UF或UT的情况下,应暂时执行上述 b 的操作。通过该操作,选择此时所选的UF、UT的值。
2 即使改写用户坐标系的值,干涉区域的空间位置也不会发生变化。在改变用户坐标的值,希望在新的用户坐标
系上定义干涉区域的情况下,再次通过 SHIFT 键+F5“位置记”来重新设定干涉区域。
10 区域的设定完成后,按下 PREV(返回)键,返回到区域详细画面。再次按下 PREV 键时,返回到区域一览画面。
了解更多:发那科机器人
